
RF-signaalien estäminen on edelleen laajimmin käytetty sähköinen vastatoimi sotilasalusjärjestelmissä, jotka torjuvat lennokkia. Se toimii täyttämällä korkean tehon elektromagneettisella kohinalla lennokin ja operaattorin välinen viestintätaajuusalue – mikä häiritsee komento- ja ohjausyhteyksiä ja pakottaa UAV:n suorittamaan ennaltaohjelmoituja turvatoimintoja, kuten paluun lähtöpaikalle, leijumisen tai itsenäisen laskeutumisen. Kolme erilaista estosignaalilaitteiston arkkitehtuuria tukee erilaisia uhkakuvia: laaja-alainen estosignaalilaitteet peittävät laajoja taajuusalueita torjuakseen tuntemattomia tai sopeutuvia lennokkeja; paikalla estosignaalilaitteet keskittävät energiansa tunnetuille ohjaustaajuuksille tehokkuuden ja vähemmän sivuvaikutusten aiheuttamisen varmistamiseksi; ja liikuta suihkua edestakaisesti häirintälaitteet vaihtavat taajuuksia nopeasti taajuusmuuttelujärjestelmiin vaikuttaakseen. Vaikka häirintä on erinomaisen tehokas, sillä on sisäisiä toiminnallisia kompromisseja: se on luonteeltaan epäselektiivinen ja voi aiheuttaa ystävällisten GPS-, radioliitäntä- ja navigointijärjestelmien häiriöitä – erityisesti kaupunkialueilla tai muilla sähkömagneettisesti tiukentuneilla alueilla.
Tilanteissa, joissa vaaditaan tarkkuutta ja varojen säilyttämistä, edistyneet sotilaalliset dronien vastatoimet käyttävät ohjattu neutralointitekniikat—erityisesti GNSS-petos ja ohjauslinkin valtaaminen. GNSS-petos lähettää väärennettyjä satelliittinavigointisignaaleja, jotka korvaavat laillisen GPS/GNSS-tiedon ja aiheuttavat navigointivirheitä ilman, että ohjauslinkki katkeaa. Tämä mahdollistaa operaattoreiden ohjata dronetta turvallisesti määritettyyn laskeutumisalueeseen—mikä on ratkaisevan tärkeää esimerkiksi oikeustieteellistä analyysiä tai sivuvaikutusten vähentämistä varten. Ohjauslinkin valtaaminen menee pidemmälle: se purkaa ja kopioidaan dronelin oma ohjausprotokolla, mikä mahdollistaa täyden telemetria- ja etäohjauksen. Toisin kuin hälytys tai petos, valtaaminen vaatii syvällistä protokollatietoa ja usein myös firmware-tasoisia tuntemuksia—mutta tarjoaa korkeimman taktisen hallinnan tason. Molemmat menetelmät kohtaavat oikeudellisia ja sääntelyllisiä rajoituksia, koska niillä on mahdollisuus häiritä siviili-ilmailun navigointiinfrastruktuuria, ja niitä käytetään yleensä vain valtuutuissa sotilas- tai kansallisen turvallisuuden sovelluksissa, kuten ITU:n radiosääntöjen ja kansallisten taajuuslupapolitiikkojen puitteissa.
Sotilaallinen vastadroniteknologia yhdistää liikkeellä toimivat esteet suunnattuihin energiakomponentteihin erilaisten UAV-kirjojen torjumiseksi eri taisteluvyöhykkeillä. Liikkeellä toimivat ratkaisut kohdistavat fyysistä voimaa yksittäisiin droneihin, kun taas suunnattu energia tarjoaa skaalautuvia, ei-liikkeellisiä vaihtoehtoja parvien torjumiseen.
Verkkokalastusdroneja käytetään kevyiden, sotkuvien kiinnitysverkkojen laukaisuun estääkseen lentolaitteita (UAV) ilmalla – tämä tarjoaa varman tuhoamisvahvistuksen ilman räjähtävää jätettä, mikä tekee niistä sopivia käytettäväksi herkän infrastruktuurin tai henkilökunnan läheisyydessä. Olkapäähän asennettavat vastalentolaitedroneja vastaan suunnatut aseet toimittavat tarkkoja kinettisiä iskuja lyhyeltä ja keskimittaiselta etäisyydeltä, ja niissä käytetään usein ohjattuja ammuksia tai ohjelmoitavia sytytyslaitteita pienien ja nopeasti liikkuvien kohdemiesten tehokkaampaan torjuntaan. Molemmat lähestymistavat perustuvat korkealaatuisen seurannan ja nopeiden tulenohjauspiirien käyttöön. Niiden päärajoitus on rajallinen patruunakaasun kapasiteetti ja logistinen taakka – erityisesti koordinoitujen partioitten torjunnassa. Tämän ongelman ratkaisemiseksi seuraavan sukupolven alustat integroivat kompaktit verkkolaukaisimet liikkuviin nelimoottorisiin droneihin, mikä parantaa liikkuvuutta, vähentää käyttökerran kustannuksia ja mahdollistaa jatkuvan valvontakyvyn.
Suuntakäyttöiset energiaseikat tarjoavat toistettavaa, alhaisen kustannuksen per laukaus -neutraalointia. Korkean energian laserit (HEL) tuottavat keskitettyä optista energiaa, jolla lämmitetään termisesti kriittisiä komponentteja – kuten lentohallintajärjestelmiä, akkuja tai roottoreita – millisekunnin tarkkuudella. Yhden HEL-käytön kustannus on vain marginaalinen sähkökulutus – yleensä alle 10 dollaria laukaukselta – mikä tekee siitä erinomaisen taloudellisen kestävien operaatioiden suorittamiseen. Korkean tehon mikroaaltolaitteet (HPM) lähettävät lyhytkestoisia, korkean intensiteetin radiotaajuuspulsseja, jotka voivat tuhota suojattomia elektroniikkalaitteita laajalla sädealueella, mahdollistaen useiden dronien samanaikaisen torjunnan parvessa. Molemmat teknologiat poistavat ballistisen romun ja tarjoavat lähes hetkellisen uudelleenkäyttömahdollisuuden – edellyttäen riittävää tehomuuntimen ja lämmönhallinnan toimintakykyä. Niiden tärkeimmät käyttörajoitukset ovat ilmakehän vaimennus (esim. sumu, sade, pöly), suoran näköyhteyden vaatimus sekä tarkan säteen vakauttamisen tarve – haasteita, joita kenttäkäytössä olevissa järjestelmissä, kuten Yhdysvaltain armeijan DE M-SHORAD -järjestelmässä, lievennetään aktiivisen optiikan ja tekoälyllä ohjattavan tarkistuksen avulla.

Tehokas vastadronpuolustus alkaa vahvalla, monitasoisella havaintojärjestelmällä. Tutka tarjoaa pitkän kantaman seurantaa fyysisistä merkeistä, mutta sen kyky havaita pienikokoisia, alhaisen radartunnistuspoikkipinnan (RCS) droneja on rajoitettu. Radioaaltojen (RF) havainto tunnistaa aktiiviset ohjaus- ja telemetriasignaalit – myös hiljaisilta tai autonomisilta UAV-lentokoneilta – ja lisää näin olennaisen käyttäytymisperusteisen kontekstin. Elektro-optiset/infrapunasensorit mahdollistavat visuaalisen luokittelun ja tunnistamisen sekä päivä- että yötäloissa, kun taas akustiset anturiryhmät havaitsevat erityisiä moottoripyöräyhteisiä ääniä ja erottavat droneja lintujen ja helikopterien joukosta. Sensoriyhdistelmän algoritmit korreloivat tietoja reaaliajassa, mikä vähentää huomattavasti vääriä hälytyksiä vaatimalla usean eri sensorityypin yhteistä vahvistusta – esimerkiksi tutkahavainnon, RF-signaalin ja infrapunasignaalin yhtäaikaista vahvistusta ennen uhkan ilmoittamista. Konenoppimismallit parantavat jatkuvasti luokittelutarkkuutta kehittyvien uhkaluetteloiden perusteella, vaikka vastavoimaisia testejä tarvitaankin edelleen varmistaakseen järjestelmän kestävyys tekoälyllä huijattujen signaalien tai alhaisen havaittavuuden (LPI) viestintätekniikoiden suhteen.
Kun uhka on vahvistettu, automaattinen päätöksentekologiikka valitsee optimaalisen neutralointimenetelmän ennalta määritettyjen toimintasääntöjen (ROE) perusteella – ottaen huomioon uhkatyypin, korkeuden, nopeuden, läheisyyden siviileihin ja ympäristöolosuhteet. Alhaisen riskin omaavat tunkeilijat saattavat aiheuttaa RF-eston; korkean nopeuden, aseelliset tai parvien muodostamiskykyiset UAV:t voivat edellyttää laser- tai kinetiikka-aseita. Nykyaikaiset integroidut C2-alustat yhdistävät havainto-, seuranta- ja vaikutusjärjestelmät yhdeksi komento-liittymäksi, mikä lyhentää reagointiajasta minuuteista sekunteihin. Yhdysvaltojen armeijan arvioinneissa – mukaan lukien oikean ajan ampumisharjoitukset White Sands Missile Range -alueella – ihmisen valvoma automaatio vähensi päätöksentekovaikeuksia yli 80 %:lla, mikä mahdollistaa liikkuvien kohteiden, kuten eteenpäin siirtyvien tukikohtien ja konvoikolumnien, dynaamisen suojelun. Tämä suljetun silmukan arkkitehtuuri edustaa perustavanlaatuista siirtymää reaktiivisesta puolustuksesta ennakoivaan ja sopeutuvaan ilmavalvontaan.
Sotilaallinen vastadroneteknologia vaatii huolellista säätöä kolmen keskitetyn suorituskyvyn akselin välillä. Luotettavuus perustuu järjestelmän kestävyyteen sähkötaistelun rasitteessa, äärimmäisissä ympäristöolosuhteissa ja kehittyvissä dronestrategioissa – mikä edellyttää monitasoista varmuuskopiointia (esimerkiksi häirintätekniikan, korkean teholähteen ja laserin yhdistämistä), vaikka se lisääkin monimutkaisuutta ja kunnossapidon taakkaa. Alue esittää jatkuvaa epäsymmetriaa: vaikka tutka on erinomainen pitkän etäisyyden havaitsemisessa, sen herkkyys laskee voimakkaasti pieniä, hitaita ja matalalla lentäviä UAV-lentokoneita vastaan – mikä lisää riippuvuutta tä дополняvista RF- ja akustisista tunnistusmenetelmistä havaintokuukkujen täyttämiseksi. Sivuvaikutukset määritellään taktinen hyväksyttävyys: kinetiikkaan perustuvat torjuntajärjestelmät aiheuttavat sirontavaaroja ja ilmatilan rajoituksia; suunnattu energiatekniikka välttää jätteitä, mutta vaatii huomattavaa tehoa ja aiheuttaa sähkömagneettisia sivuvaikutuksia, jotka voivat vaikuttaa läheisissä laitteissa oleviin elektronisiin järjestelmiin. Komentajat punnitsevat näitä tekijöitä tehtävän tavoitteiden, maasto-olosuhteiden ja oikeudellisten puitteiden – mukaan lukien puolustusministeriön direktiivi 3000.09 autonomisista asejärjestelmistä – perusteella, jotta voidaan rakentaa puolustusjärjestelmiä, jotka tasapainottavat tehokkuuden, vastuuvelvollisuuden ja suhteellisuuden.
RF-signaalien häirintä katkaisee kommunikaation lennokin ja sen käyttäjän välillä käyttäen sähkömagneettista kohinaa, mikä pakottaa lennokin turvatoimiin, kuten kellumiseen tai laskeutumiseen.
GNSS-huijaus lähettää väärentettyjä satelliittinavigointisignaaleja korvatakseen todelliset tiedot, mikä aiheuttaa navigointivirheitä. Tällä menetelmällä operaattorit voivat ohjata droneja turvallisesti ilman, että he katkaisevat dronen hallintayhteyttä.
Liike-energiaan perustuvat esteet kykenevät fysikaalisesti estämään dronien toimintaa esimerkiksi verkkojen laukaisulaitteilla tai antiuunipistoolilla. Ne kohdistuvat yksittäisiin droneihin ja ovat tehokkaita tarkkojen iskujen suorittamiseen.
Suuntakäyttöiset energiasekäytteet, kuten laserit ja korkean tehon mikroaaltolaitteet, lähettävät keskitettyä energiaa dronejen neutraloimiseksi ilman ballistista jäännösmateriaalia, mikä tekee niistä soveltuvia parvikäskyjen torjuntaan.
Sensorien yhdistäminen integroi tietoja tutkasta, RF-havainnoinnista, EO/IR-järjestelmistä ja akustisista järjestelmistä tarkemman uhkan tunnistamisen ja vähentää väärävaroitusten määrää.
Automatisoitu päätöksenteko nopeuttaa reagointia ja valitsee parhaan neutralointimenetelmän analysoimalla uhkamuotoa, ympäristöolosuhteita ja muita tekijöitä.
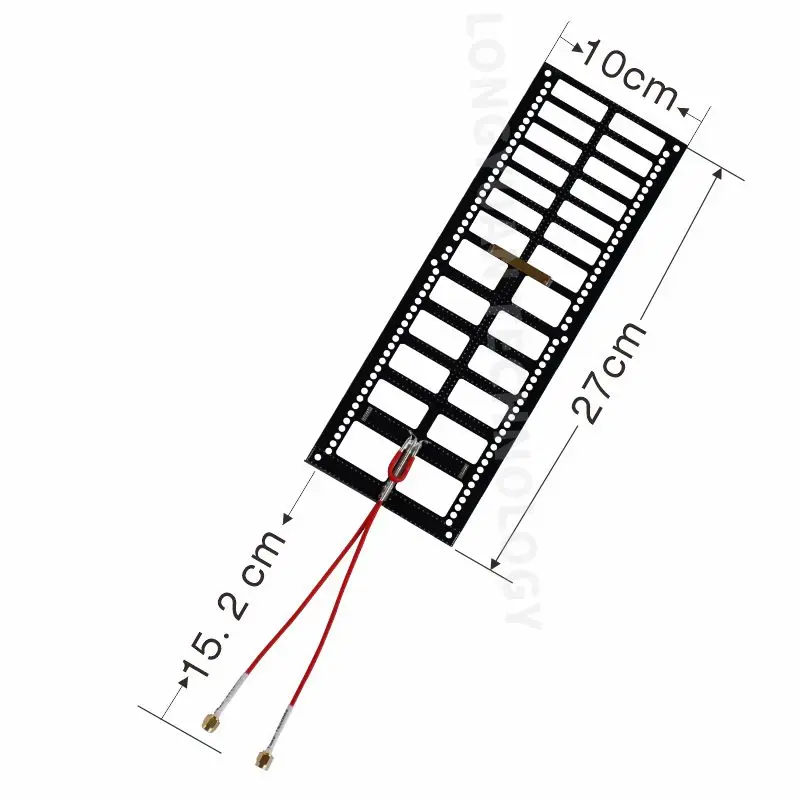
Shenzhen Longyuan Technology tarjoaa älykkäitä dronien torjuntajärjestelmiä lentokentille, stadioneille ja kriittisille infrastruktuureille. Reaaliaikainen RF-havainto, seuranta ja häirintä korkean vahvistuksen antennien ja räätälöityjen ratkaisujen avulla. Turvallisuusryhmien luottamustuote ympäri maailman.
Rakennus A, Kaishangde-teollisuuspuisto, Xinghua Road 1, Pingdi, Longgang, Shenzhen
Tekijänoikeus © 2026 Shenzhen Longyuan Technology Co., Ltd. Kaikki oikeudet pidätetään. Tietosuojakäytäntö




 Uutiset
Uutiset