
Радио-функционално мешање је и даље најшироко распоређена електронска контрамерка у војним анти-дрон системима. То ради тако што поплава комуникациони опсег између дрона и оператера високом моћном електромагнетном буком, нарушавајући командне и контролне везе и присиљавајући ДНВ на унапред програмирано поверење сигурно од грешке, као што су повратак на лансирање, летање или аутономно слетање Три архитектуре за мешање подржавају различите профиле претњи: заби саметачи широких фреквенционих опсега за борбу против непознатих или адаптивних дронова; место залагачи концентришу енергију на познатим контролним опсеговима за ефикасност и смањење спољних интерференција; и метлице ђаммери брзо циклирају кроз фреквенције како би укључили системе за прелазак на фреквенције. Иако је веома ефикасна, мешање носи са собом оперативне компромисе: по природи је неразборно и ризикује поремећај пријатељских ГПС, радио и навигационих система, посебно у урбаним или гужваним електромагнетним окружењима.
За сценарије који захтевају прецизност и очување средстава, напредни војни анти-дрон системи распоређују контролисан технике неутрализацијепре свега GNSS суфуфирање и киднапирање командних веза. ГНСС суфуфирање преноси фалсификоване сателитске навигационе сигнале који надмашују легитимне ГПС/ГНСС податке, изазивајући навигационе грешке без прекида контролне везе. Ово оператерима омогућава да безбедно воде дрон до одређене зоне слетањакритичне за судску анализу или минимизацију ризика од неисправних ствари. Камална линк киднапирање иде даље: он реверс-инжењеринг и репликује дронс власнички контролни протокол, омогућавајући потпуни телеметријски приступ и удаљено пилотирање. За разлику од мешања или суфуфирања, киднапирање захтева дубоко знање протокола и често познавање на нивоу фирмавераали пружа највиши степен тактичке контроле. Обе методе се суочавају са правним и регулаторним ограничењима због свог потенцијала да се мешају у инфраструктуру навигације цивилног ваздухопловства и обично су ограничене на овлашћене војне или националне безбедносне апликације у оквиру оквира као што су Регулације ИТУ радија и националне политике
Војна технологија против дронова комбинује кинетичке пресретчице са усмереним енергетским системима како би се решиле различите претње БПЛА преко зона ангажмана. Кинетичка решења циљају појединачне дронове физичком силом, док усмерена енергија нуди скалибилне, некинетичке опције за родове.
Дрони који пуцају мрежу распоређују лажне, заплете мреже за заробљавање да онемогуће ДНВ-ове усред летапонуђујући позитивну потврду убиства без експлозивних остатака, што их чини погодним за употребу у близини осетљиве инфраструктуре или особља. Анти-дрон пушкине које се пуцају са рамена пружају прецизне кинетичке ударе на кратком до средњем даљини, често користећи вођене пројектиле или програмиране гасице како би максимизовали смртоносност против малих, брзо крећућих мета. Оба приступа ослањају се на високоверно праћење и брзе петље за контролу ватре. Њихова главна ограничења леже у коначном капацитету магазина и логистичком оптерећењу, посебно против координисаних родова. Да би се то решило, платформе следеће генерације интегришу компактне лансере мрежа на агилне платформе квадрокоптера, побољшавајући маневреност, смањујући трошкове распореде по ангажовању и омогућавајући трајне могућности надзора.
Направљено оружје обезбеђује понављајућу, јефтину неутрализацију по пуцњи. Ласери високе енергије (ХЕЛ) испоручују фокусирану оптичку енергију за топлотно деградирање критичних компонентикао што су контролери летења, батерије или ротори са прецизношћу од милисекунде. Једини ХЕЛ ангажовање кошта само граничну електричну енергију - обично испод 10 долара по пуцању - што га чини изузетно економичним за трајне операције. Систем високомоћних микроталаса (ХПМ) емитује краткотрајне, високоинтензивне РФ импулсе способне да прже незаштићене електронике преко широких углова зрака, омогућавајући истовремено ангажовање више дронова у роју. Обе технологије елиминишу балистичке остатке и нуде скоро тренутну способност поново ангажовањапри условима адекватног кондиционирања енергије и топлотног управљања. Њихови главни оперативни ограничења укључују атмосферску атенуацију (нпр. магла, киша, прашина), захтеве линије вида и потребу за прецизном стабилизацијом зрака.

Ефикасна одбрана од дронова почиње са снажним, вишеслојним детекцијом. Радар пружа дугодајне праћење физичких потписа, али се бори са микро-дронима са ниским РЦС-ом. РФ детекција идентификује активну контролу и телеметријске преносе чак и од тихих или аутономних БЛА додајући кључни поведенски контекст. Електрооптички/инфрацрвени сензори (EO/IR) омогућавају визуелну класификацију и идентификацију у условима дана и ноћи, док акустички арејс открива јединствену роторску хармонику како би се одредили дронови од птица или хеликоптера. Алгоритми фузије сензора корелишу улазе у реалном времену, драматично смањујући стопу лажних аларма захтевајући кросомодалну валидацијуна пример, потврђивање радарног трага + радио-функционалне емисије + ИР потписа пре објављивања претње. Модели машинског учења континуирано побољшавају тачност класификације према развијаним библиотекама претњи, иако је супротно тестирање и даље неопходно за валидацију отпорности против лажних сигнала или комуникација са ниском вероватноћом пресрећања (ЛПИ).
Када се претња потврди, аутоматизована логика одлуке одабира оптималну методу неутрализације на основу унапред конфигурисаних правила ангажовања (ROE) факторинг у типу претње, надморској висини, брзини, близини цивила и условима животне средине. Интрузи који су ниско ризични могу изазвати радио-референцијску мешавина; БПЛА са високом брзином, наоружаним или способним за рој могу да се повећају до ласерског или кинетичког ангажмана. Модерне интегрисане Ц2 платформе унификују детекцију, праћење и ефекторе у један командни интерфејс, компресирање времена одговора од минута до секунди. Као што је показано у америчким армијама, укључујући вежбе са пуцњавом на ракетном полигону Бели песци, аутоматизација под људским надзором смањује кашњење одлуке за више од 80%, омогућавајући динамичну заштиту мобилних средстава као што су напредне оперативне базе и колоне конвоја Ова архитектура затвореног циклуса представља фундаментални прелаз од реактивне одбране на предвиђање, адаптивно одбијање ваздуха.
Војна технологија против дронова захтева пажљиву калибрацију преко три међузависне оси перформанси. Поузданост зависи од отпорности система под стресом електронског ратовања, екстремним условима животне средине и развијајућим тактикама дроноватребајући слојено редуданцију (нпр. комбиновање мешања са ХПМ и ласером) упркос додатој сложености и опширним трошко Domet има трајну асиметрију: док радар одликује у откривању на дуги домет, његова осетљивост оштро пада у односу на мале, споре, ниске висине БПЛАупирање залагања за комплементарне РФ и акустичко сензирање за затварање јазби за откривање Обезбеђивање дефинисати тактичку прихватљивост: кинетички пресретњачи уводе опасности од фрагментације и ограничења ваздушног простора; системи усмерене енергије избегавају остатке, али захтевају значајну снагу и генеришу електромагнетне нежељене ефекте који могу утицати на оближњу електронику. Команданти претежу ове променљиве према циљевима мисије, ограничењима терена и правним оквирима, укључујући директиву Министарства одбране 3000.09 о аутономним оружјем, како би конфигурисали одбрану која уравнотежава ефикасност, одговорност и пропорционалност.
Радио-функционално мешање сигнала нарушава комуникацију између дрона и његовог оператера користећи електромагнетну буку, присиљавајући дрон на сигурно понашање као што су летање или слетање.
ГНСС суфуинг шаље лажне сателитске навигационе сигнале како би се превазишли легитимни подаци, што изазива навигационе грешке. Ова техника омогућава оператерима да безбедно управљају дроновима без прекида контролне везе.
Кинетички пресретњачи физички онемогућавају дронове користећи методе као што су уређаји за пуцање мрежом или противдронови пушки. Они су усмерени на појединачне дронове и ефикасни су за прецизне ударе.
Оружје усмерене енергије, као што су ласери и јаке микроталасе, емитују фокусирану енергију да би неутралисале дронове без балистичких остатака, што их чини погодним за напад роја.
Сливање сензора интегрише податке из радара, детекције РФ, ЕО/ИР и акустичких система за прецизнију идентификацију претње и смањење лажних аларма.
Автоматизована логика доношења одлука убрзава време одговора, бирајући најбољу методу неутрализације анализирајући врсту претње, услове околине и друге факторе.
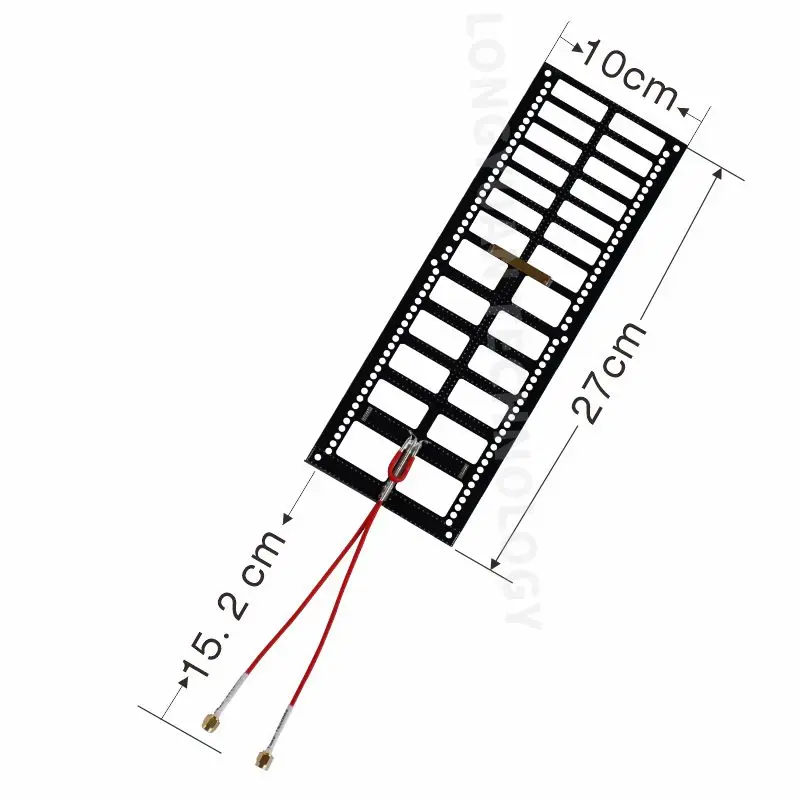
Шенжен Лонгјуан технологија пружа интелигентне системе против дронова за аеродроме, стадионе и критичну инфраструктуру. Реално време РФ детекције, праћења и мешања са антенама са високим добитком и прилагођеним решењима. Верују ми глобалне безбедносне екипе.
Зграда А, индустријски парк Каишангде, број 1 улица Сингхуа, подокруг Пинди, округ Лонгганг, град Шенжен
Ауторско право © 2026 Шенжен Лонгјуан Технологија Цо, Лтд. Сва права су задржана. Политике приватности




 Топла вест
Топла вест